Linear differential equations are of the form
The linear operator
The linearity condition on
where
Second-Order Linear Differential Equations
A second-order linear differential equation has the form:
where
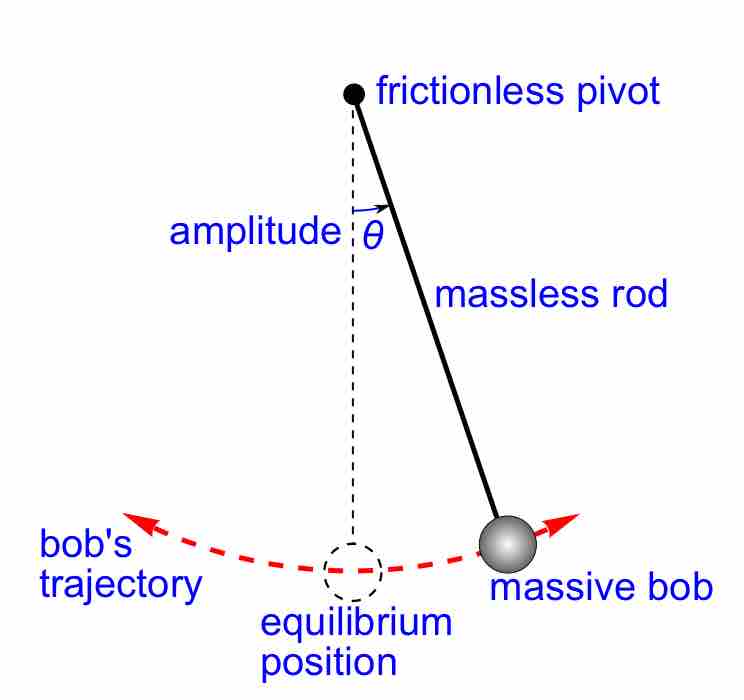
Simple Pendulum
A simple pendulum, under the conditions of no damping and small amplitude, is described by a equation of motion which is a second-order linear differential equation.