In classical mechanics, a harmonic oscillator is a system that, when displaced from its equilibrium position, experiences a restoring force, F, proportional to the displacement, x:
Driven harmonic oscillators are damped oscillators further affected by an externally applied force F(t). Newton's second law takes the form
In the case of a sinusoidal driving force:
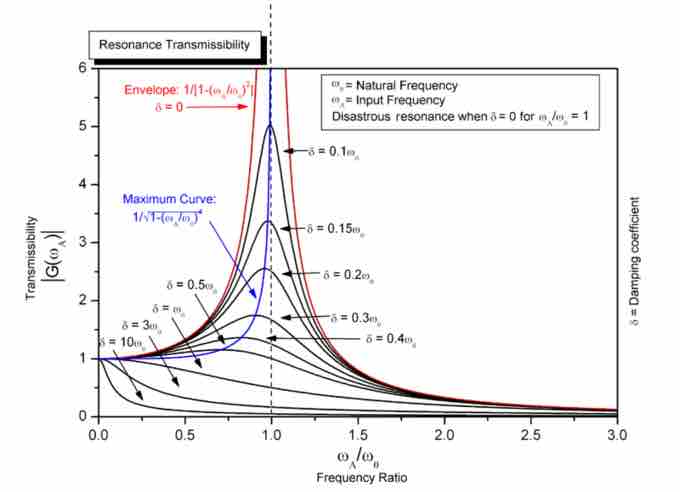
Resonance
Steady state variation of amplitude with frequency and damping of a driven simple harmonic oscillator.